
Navigation von explorierenden Tiefseefahrzeugen
- Ansprechpartner: Dipl.-Inform. Philipp Woock
- Projektgruppe:
Mess-, Regelungs- und Diagnosesysteme
Projektbeschreibung
Problemstellung
Die Ozeane sind heutzutage immer noch weniger gründlich erforscht als das Weltall. Um unser Verständnis über die Weltmeere zu verbessern und Erkundungen durchzuführen, wird der Einsatz von Autonomen Tiefseefahrzeugen (engl.: AUV) immer wichtiger.
Autonome Tiefseefahrzeuge stellen eine besondere Klasse von mobilen Robotern dar, die zur autonomen Navigation üblicherweise kein globales Positionsbestimmungssystem heranziehen können, wie es bei Land- oder Flugrobotern beispielsweise mit GPS oder GLONASS der Fall ist. Das bedeutet, dass Techniken zur simultanen Lokalisierung und Kartenerstellung (engl.: SLAM) eine besonders große Bedeutung zukommt, weil damit auch im Unterwasserbereich Navigationsfehler begrenzt werden können.
Dazu ist es notwendig, dass ein AUV Stellen am Meeresboden bei einer erneuten Vorbeifahrt tatsächlich als bereits bekannte Stellen erkennt. Hierfür können verschiedene Sensoren zum Einsatz kommen, die eine solche Wiedererkennung ermöglichen. Während in Flachwasseranwendungen diese Rolle oft von Kameras übernommen wird, ist in großen Tiefen ein Sonarsensor die geeignetste Möglichkeit, die Strukturen der Umgebung zu erfassen.
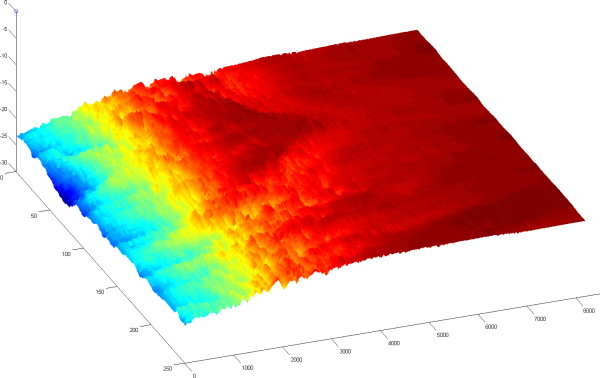
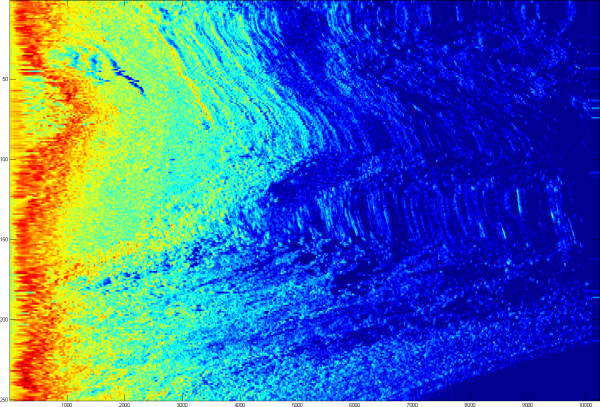
Ein weitverbreiteter Sonarsensor ist das sog. Side-Scan Sonar welches zu ausgesendeten Sonarpuls die eingehende Echointensität über der Zeit aufzeichnet. Diese Sonardaten beinhalten die räumliche Struktur der Umgebung jedoch nur implizit. Die Side-Scan-Sonardaten des gleichen Ortes sehen jedoch stark unterschiedlich aus, wenn sie von einer anderen Seite kommend und mit unterschiedlicher Fahrzeugeigenbewegung aufgenommen wurden (Verzerrungen, anderer Sonar-Schattenwurf). Daher wird aus den Sonardaten zunächst eine räumliche Repräsentation geschätzt, die bei einer erneuten Passierung dieses Ortes eine Wiedererkennung robuster ermöglicht als die Sonarbilder direkt. Da allerdings verschiedene Meeresbodengeometrien identische Sonaraufnahmen erzeugen können, ist das Finden der tatsächlichen Geometrie nur unter Zusatzannahmen über den Meeresgrund möglich, weswegen man auch von einem schlecht gestellten inversen Problem spricht.
Für die SLAM-basierte Navigation werden Merkmale solcher Art verwendet, dass sie auf verschiedenen Rekonstruktionen desselben Ortes (von mehreren Passierungen) dennoch eine zuverlässige Wiedererkennung
|
|
|
Ziele:
Es werden Verfahren entwickelt, die es erlauben ein SLAM-Verfahren auf Side-Scan Sonardaten anzuwenden um damit Navigation von Tiefseefahrzeugen zu ermöglichen. In Zusammenarbeit mit dem Fraunhofer IOSB im Projekt TIETeK werden die Verfahren an einem realen Tiefseefahrzeug erprobt.
|
|
 |
