SFB 588 Humanoide Roboter
Teilprojekt M2: Szenen- und Situationsmodellierung
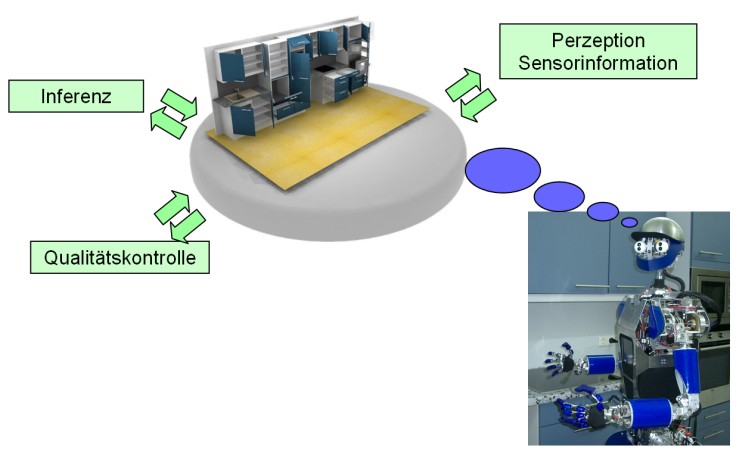
Das Teilprojekt M2 wird am Institut für Anthropomatik bearbeitet. Das zentrale Ziel dieses Teilprojekts ist, ein objektorientiertes Gesamtmodell der Umwelt aufzubauen. Dieses Modell enthält die für den Roboter relevanten Fakten in Form von Objekten und deren Relationen. Es ist mit Schnittstellen versehen, um als echtzeitfähige Informationsdrehscheibe für alle Systemkomponenten wie z.B. Perzeption und Inferenzprozesse zu dienen. Informationen können eingebracht und ausgelesen werden. Vorhandene Objekte oder Relationen lassen sich manipulieren. Neue Information kann zur Instanziierung neuer Objekte oder Relationen verwendet werden. Als Metapher für das Umweltmodell kann ein digitaler Sandkasten dienen, der virtuelle Stellvertreter für die relevanten Objekte der Umwelt enthält und die Möglichkeit bietet, einen Überblick über das aktuelle Geschehen zu gewinnen. Das Modell ergänzt somit die kognitiven Fähigkeiten des Roboters um eine Gedächtnisstruktur, die ihm ein komplettes Bild seiner Umgebung vermittelt.