Variable Bildgewinnung und -verarbeitung
In vielen Industrieanwendungen kann eine relevante Szene nicht mit einer Einzelaufnahme so erfasst werden, dass die relevante Information erkennbar ist. Bildserien mit variierten Aufnahmeparametern (z.B. Kamera Position oder Richtung, Beleuchtungsspektrum oder Lichtpolarisation) erlauben, relevante Informationen über eine Szene zu gewinnen, wie in Bild 1 und 2.
Bild 1: Bildserie mit variierter Fokusposition (links) und das Fusionsergebnis mit der maximalen Schärfe in jedem Punkt (rechts).
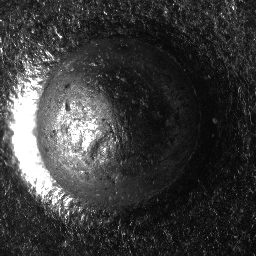
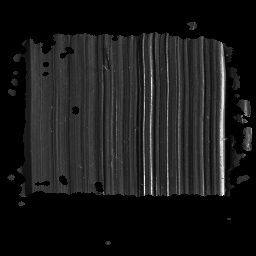
Bild 2: Variation des Azimuts einer gerichteten Beleuchtung (links) und das Fusionsergebnis mit segmentiertem Riefenbereich (rechts).
Fortschritte bei den mathematischen Verfahren zur Modellierung, Planung und Auswertung von Bildserien sowie die Verfügbarkeit von günstigen Kamera- und Handhabungssystemen machen solche Verfahren immer interessanter für den Anwender, wenn Standardverfahren der Bildverarbeitung und der automatischen Sichtprüfung für die Aufgabe nicht nutzbar sind oder eine hohe Flexibilität der Inspektion erforderlich ist.
Kompetenzen und Forschungsthemen
Die Forschungsgruppe Variable Bildgewinnung und -verarbeitung (VBV) hat sich zusammen mit dem Fraunhofer Institut für Optronik, Systemtechnik und Bildauswertung IOSB (ehemals IITB) zum strategischen Ziel gesetzt, die Möglichkeiten variabler Bildaufnahmesysteme grundlegend zu erforschen und wirtschaftlich nutzbar zu machen. Auf der wissenschaftlichen Agenda stehen wichtige Forschungsgebiete, die zur systematischen Nutzung variabler Bilderfassung und -verarbeitung erforderlich sind:
- Systemtheorie stellt die theoretischen Grundlagen für die Erfassung der Bildserien dar. Ein Schwerpunkt wird auf die Darstellung der verfügbaren Parameterräume und deren gegenseitigen Abhängigkeiten gelegt.
- Variable Aufnahmetechniken. Sie enthält die Identifizierung der Aufnahmeparameter, durch deren Variation zusätzlicher Information gewonnen werden. Zudem enthält sie Techniken zur rechnergestützten und reproduzierbaren Erfassung von Bildserien. Der Fokus liegt hierbei auf der Handhabung der Komponenten der Bildgewinnung, der Entwicklung geeigneter Beleuchtungseinrichtungen sowie der Erarbeitung von Beleuchtungsstrategien und deren experimenteller Umsetzung.
- Fusion von Bildserien um die interessierende Information zu extrahieren.
- Active Vision ist eine Art Regelkreis um die Aufnahmeparameter unter Berücksichtigung vorheriger Ergebnisse zu optimieren. Das üblicherweise in der automatischen Sichtprüfung praktizierte statische „Ansehen“ des Objekts wird durch ein dynamisches „Nachsehen“ ersetzt, welches die die visuelle Inspektion eines Experten nachahmt.
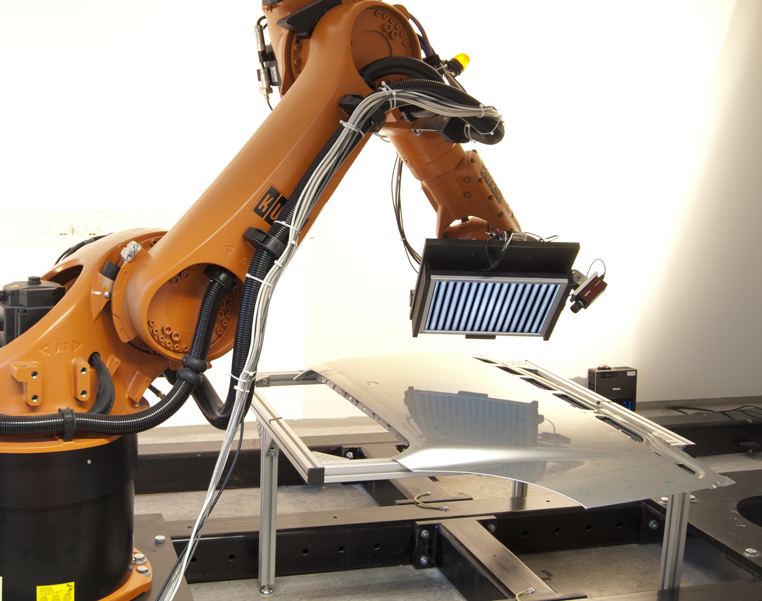
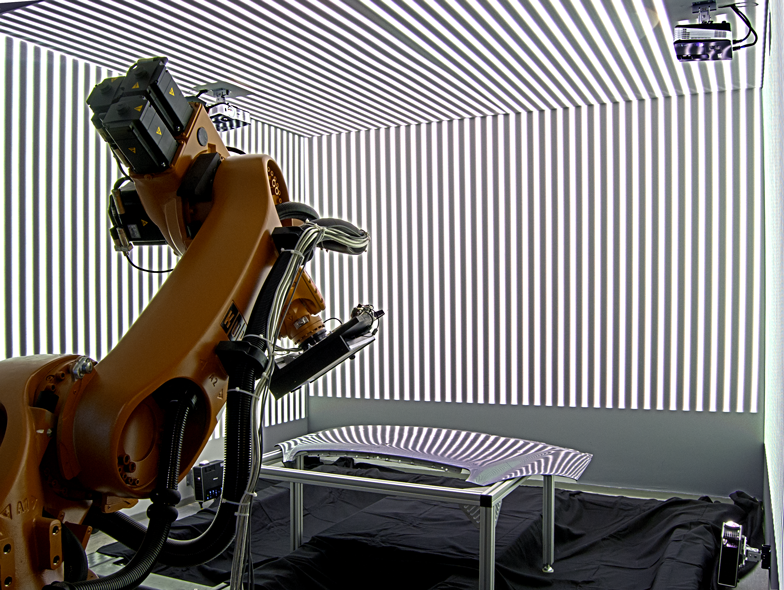
- Inspektion spiegelnder Oberflächen durch Deflektometrie. Dabei beobachtet eine Kamera die Spiegelung eines generierten Musters in der Oberfläche. Forschungsschwerpunkte der Gruppe VBV sind insbesondere die schnelle Defektdetektion mit inversen Mustern, die robotergestützte Prüfung großer Bauteile, die Inspektion teilspiegelnder Oberflächen und die mathematische Analyse des Rekonstruktionsproblems sowie dessen Regularisierung mit Hilfe von
Infrastruktur und Ausstattung
- Roboter-Labor: Ein präziser Industrieroboter ermöglicht es beliebige geometrische Konstellationen von Kameras, Lichtquellen, Objekte, usw. zu erfassen.
- Laser-Labor: Ein Industrielaser mit programmierbarem Fokuskopf zusammen mit einem wärmeresistenten Bildschirm stellt beliebige Bilder im thermischen Infrarot dar.
- Deflektometriesensorkopf. Der Sensorkopf besteht aus einem LC-Display als Mustergenerator, mehreren hochauflösenden Videokameras sowie einem sensorintegrierten Steuer- und Auswerterechner. Durch seine kompakte Ausführung kann der Sensorkopf auf einen Industrieroboter montiert werden und ermöglicht somit die Inspektion großer (teil)spiegelnder Bauteile unter gezielt variierter Beleuchtung.