
Nutzung mechanisch und optisch multivariater Aufnahmekonstellationen für die automatische Sichtprüfung.
Aufgabengebiet
Ein Gebiet der industriellen Bildverarbeitung mit hohem Entwicklungspotenzial beruht auf der gezielten Anwendung und Ausnutzung variabler Erfassungstechniken. Mit Hilfe von Robotern können beispielsweise das Kamera-Gesichtsfeld wesentlich erweitert und die Zugänglichkeit kompliziert geformter Bauteile verbessert werden. Darüber hinaus lassen sich durch Bildserien mit anderen variierten Parametern, z.B. Richtung, Polarisation oder Spektrum der Beleuchtung Informationen über eine Szene gewinnen, die sonst nur aufwendig durch andere Messverfahren zugänglich wären. Diese Techniken bieten dem Anwender interessante Möglichkeiten, wenn durch schnelle und berührungslose Verfahren der automatischen Sichtprüfung flexibel wichtige Zusatzinformationen gewonnen werden können, was im Umfeld individueller Fertigung und kundenspezifischer Lösungen erfolgsentscheidend sein kann.
Beispiele für Aufgabenstellungen und Lösungsansätze finden Sie ![]() hier.
hier.
Kompetenzen und Forschungsthemen
Die Forschungsgruppe Variable Bildgewinnung und -verarbeitung (VBV) hat sich zusammen mit dem Fraunhofer Institut für Optronik, Systemtechnik und Bildauswertung IOSB (ehemals IITB) zum strategischen Ziel gesetzt, Möglichkeiten variabler Bildaufnahmesysteme grundlegend zu erforschen und wirtschaftlich nutzbar zu machen. Auf der wissenschaftlichen Agenda stehen wichtige Forschungsgebiete, die zur systematischen Nutzung variabler Bilderfassung und -verarbeitung erforderlich sind:
- Systemtheorie
Für die Erfassung von Bildserien wird eine Systemtheorie erarbeitet, welche die theoretischen Grundlagen für die sinnvolle Aufnahme von Bildserien darstellt. Besonderes Gewicht wird auf die Darstellung der verfügbaren Parameterräume und deren gegenseitigen Abhängigkeiten gelegt. - Variable Aufnahmetechniken
Aufnahmeparameter werden identifiziert, deren Variation die Gewinnung zusätzlicher Information ermöglicht. Zur Erfassung von Bildserien werden Techniken entwickelt, um die zu variierenden Parameter rechnergestützt und reproduzierbar einzustellen. Schwerpunkte liegen hierbei auf der Handhabung der Komponenten der Bildgewinnung, der Entwicklung geeigneter Beleuchtungseinrichtungen sowie der Erarbeitung von Beleuchtungsstrategien und deren experimenteller Umsetzung. - Fusion von Bildserien
Aus Bildserien wird die interessierende Information durch Fusion extrahiert. Unterschiedliche Fusionsverfahren werden theoretisch analysiert und zur Anwendung auf Bildserien mit multivariaten Aufnahmekonstellationen weiterentwickelt. Das von VBV entwickelte Kamera-Array ermöglicht beispielsweise die Aufnahme kombinierter Stereo-, Spektral- und Fokusserien. Die Auswertung dieser multivariaten Bildserien liefert eine umfassende geometrische und spektrale Beschreibung der inspizierten Szene. - Active Vision
Aus der Beurteilung von Einzelbilden und der Fusionsergebnisse einer Bildserie kann auf die Eignung der Aufnahmeparameter für das zu untersuchende Objekt bzw. die Szene geschlossen werden. Durch Optimierung der Aufnahmeparameter unter Berücksichtigung vorheriger Ergebnisse wird eine Art Regelkreis entwickelt, der zu einem für das Objekt bzw. die Szene optimalen Parametersatz führt. Das üblicherweise in der automatischen Sichtprüfung praktizierte statische „Ansehen“ des Objekts soll so ersetzt werden durch ein dynamisches „Nachsehen“, das die visuelle Inspektion eines Experten imitiert. - Inspektion spiegelnder Oberflächen
Die Deflektometrie ist ein Verfahren zur Inspektion spiegelnder Oberflächen. Dabei beobachtet eine Kamera die Spiegelung eines generierten Musters in der Oberfläche. Forschungsschwerpunkte der Gruppe VBV sind insbesondere die schnelle Defektdetektion mit inversen Mustern, die robotergestützte Prüfung großer Bauteile, die Inspektion teilspiegelnder Oberflächen und die mathematische Analyse des Rekonstruktionsproblems sowie dessen Regularisierung mit Hilfe von Zusatzinformation.
Infrastruktur und Ausstattung
- Roboter-Labor
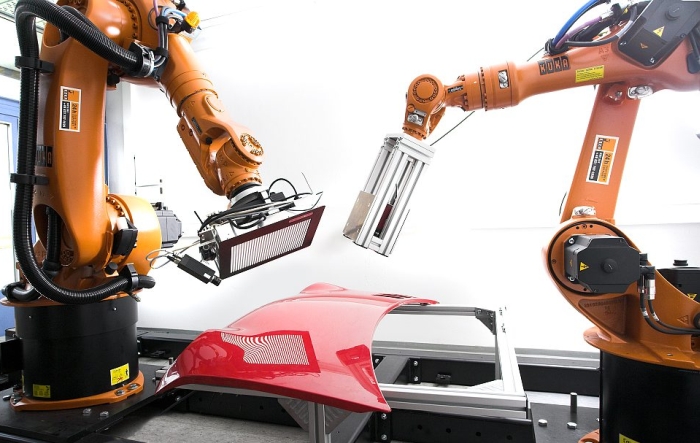
Zwei kooperierende Industrieroboter ermöglichen die Variation sämtlicher geometrischer Freiheitsgrade der Bilderfassung. Damit lassen sich automatisiert und reproduzierbar z. B. die winkelabhängigen Reflektanzeigenschaften von Oberflächen (Bidirektionale Reflektanz-Verteilungsfunktion, BRDF) vollständig erfassen oder Prüfobjekte mit variabler Beleuchtungs- und Kameraposition erfassen. - Beleuchtungstechnisches Testlabor
Mit geringem Aufwand lassen sich experimentell Beleuchtungsstrategien für Voruntersuchungen erproben. Dazu wird ein Versuchsaufbau genutzt, der reproduzierbare Beleuchtungskonstellationen gewährleistet. Beleuchtungsserien können halbautomatisch erfasst werden. - Multivariates Kamera-Array
Ein zweidimensionales Kamera-Array wird mit unterschiedlichen Einstellungen (z.B. Fokusposition, Blende) und Filtern (Polarisations- und spektrale Filter) betrieben, um multivariate Bildserien von Szenen zu erfassen. Die Fusion der Bildserien erlaubt die systematische Auswertung wichtiger Szeneneigenschaften. - Deflektometrie-Sensorkopf
Der Sensorkopf besteht aus einem LC-Display als Mustergenerator, mehreren hochauflösenden Videokameras sowie einem sensorintegrierten Steuer- und Auswerterechner. Durch seine kompakte Ausführung kann der Sensorkopf auf einen Industrieroboter montiert werden und ermöglicht somit die Inspektion großer (teil)spiegelnder Bauteile unter gezielt variierter Beleuchtung.